前言
本文是南京大学李樾、谭添老师的《软件分析》课程的笔记。内容来自课程ppt以及课程讲解。
课程主页:Static Program Analysis | Tai-e (pascal-lab.net)
授课视频:视频南京大学《软件分析》课程01(Introduction)_哔哩哔哩_bilibili
课程实验repo:pascal-lab/Tai-e-assignments: Tai-e assignments for static program analysis (github.com)
Contents
- Overview of Data Flow Analysis
- Preliminaries of Data Flow Analysis
- Reaching Definitions Analysis
- Live Variables Analysis
- Available Expressions Analysis
Overview of Data Flow Analysis
Data Flow Analysis -> How Data flows on CFG?
-> How application-specfific Data Flows through the Nodes(BBs/statements) and Edges(control flows) of CFG(a program)?
- application-specfific Data: Abstraction, + - 0 $\top$ $\bot$
- Flows: Safe-approximation. For most stactic analyses are “may analysis”
- may analysis: outputs information that may be true (over-approximation)
- must analysis: outputs information that must be true (under-approximation)
- Over- and under-approximations are both for safety of analysis
- Nodes: Transfer function, e.g. (+) + (+) = (+)
- Edges: Control-flow handing: Union the sign at merges
different data-flow analysis applications have
different data abstraction and
different flow safe-approximation strategies, i.e.,
different transfer functions and control-flow handlings
Preliminaries of Data Flow Analysis
Input and Output States
- Each execution of an IR statement transforms an input state to a new output state
- The input(output) state is associated with program point before(after) the statement
In each data-flow analysis application, we associate with every program point ==a data-flow value== that represents an ==abstraction== of the set of all possible ==program states== that can be observed for that point.
1 | x = 10; |
The set of possible data-flow values is the domain for this application(+ - 0 $\top$ $\bot$)
Data-flow analysis is to ==find a solution== to a set of ==safe-approximation directed constraints== on the IN[s]’s and OUT[s]’s, for all statements s.
- constraints based on semantics of statements (transfer functions)
- constraints based on the flows of control
Notations for Transfer Function’s Constraints
- Forward Analysis: $OUT[s] = f_s(IN[s])$
- Backward Analysis: $IN[s] = f_s(OUT[s])$
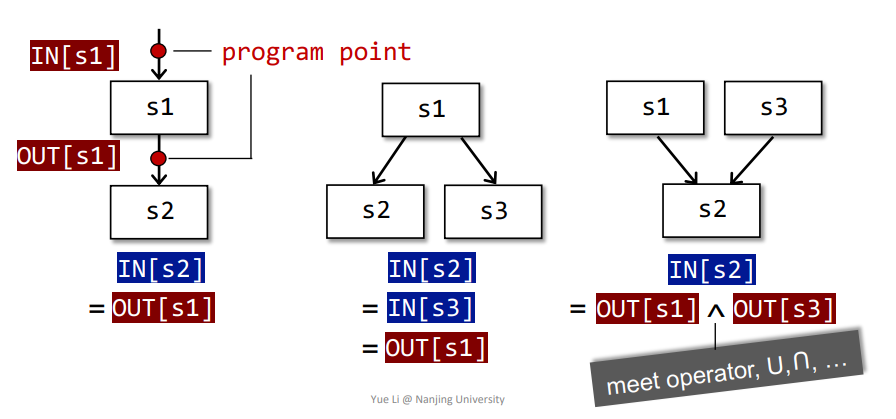
Notations for Control Flow’s Constraints
Control flow within a BB: $In[s_{i+1}] = OUT[s_i], for ~all~i = 1,2,…n-1$
Control flow among BBs:
$IN[B]=IN[s_1]$
$OUT[B]=OUT[s_n]$
Forward:
$OUT[B]=fB(IN[B]),f_B=f{sn}\circ …\circ f{s2} \circ f{s_1}$
$IN[B]=\wedge P_{~a~predecessor of B}~OUT[P]$
Backward:
$IN[B]=fB(OUT[B]),f_B=f{s1}\circ f{s2} \circ …\circ f{s_n}$
$OUT[B]=\wedge S_{~a~successor of B}~IN[S]$
The meet operator $\wedge$ is used to summarize the contributions from different paths at the confluence of those paths
Issues Not Covered:
- Method Calls
- Intra-procedural CFG
- Will be introduced in lecture: Inter-procedural Analysis
- Aliases
- Variables have no aliases
- Will be introduced in lecture: Pointer Analysis
Reaching Definitions Analysis
Reaching Definition
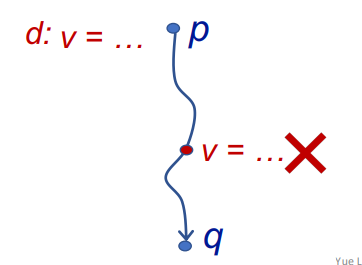
A ==definition d== at program point p ==reaches== a point q if there is a path from p to q such that ==d== is not “killed” along that path.
A definition of a variable v is a statement that assigns a value to v
Translated as: definition of variable v at program point p reaches point q if there is a path from p to q such that no new definition of v appears on that path
- Reaching definitions can be used to ==detect possible undefined variables==. e.g., introduce a dummy definition for each variable v at the entry of CFG, and if th e dummy definition of v reaches a point p where v is used, then v may be used before definition (as undefined reaches v)
Understanding Reaching Definitions
Abstraction:
Data Flow Values/Facts
The definition of all the variables in a program
Can be represented by bit vectors
e.g., D1, D2, D3, D4, …, D100 (100 efinitions)
$\underbrace{0000…0}_{100}$
Bit i from the left represents definition Di
Safe-approximation
1 | D: v = x op y |
This statement “generates” a definition D of variable v and “kills” all the other definitions in the program that define variable v, while leaving the remaining incoming definition unaffected.
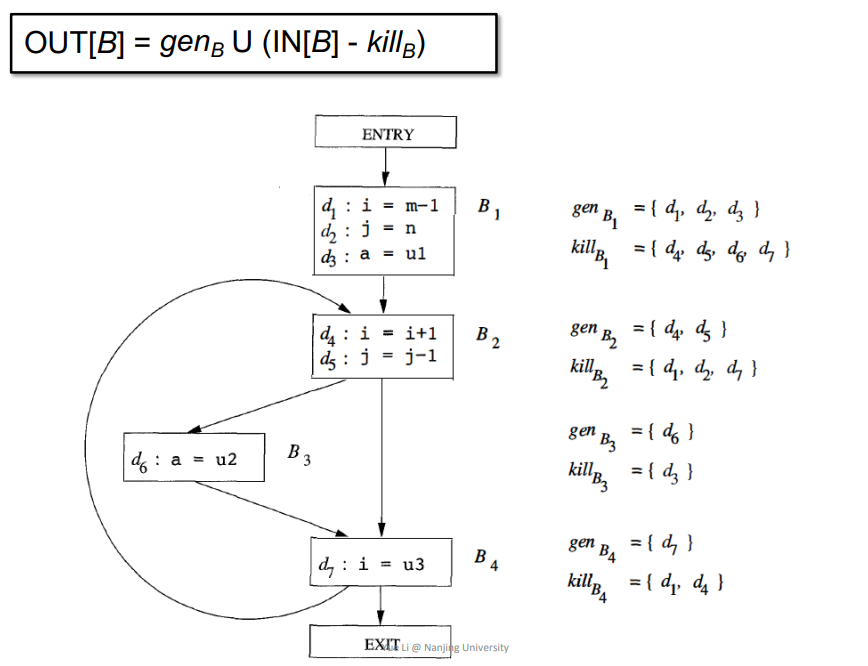
Transfer Function
$OUT[B] = gen_B\cup(IN[B] - kill_B)$
Control Flow
$IN[B]=\cup P_{~a~predecessor of B}~OUT[P]$
Algorithm of Reaching Definitions Analysis
INPUT: CFG($kill_B$ and $gen_B$ computed for each basic block B)
OUTPUT: $IN[B]$ and$OUT[B]$ for each basic block B
METHOD: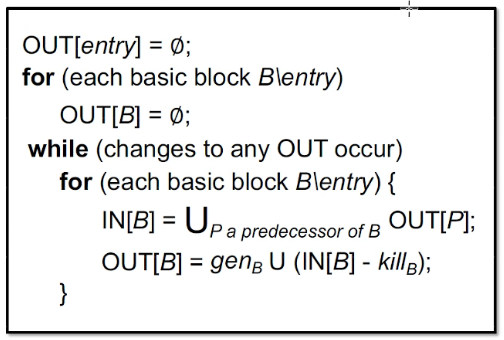
解释:
$OUT[entry]=\phi$含义:
entre没有statements 和 definition
for中each basic block $B\entry$和第一行的$OUT[entry]=\phi$ 为什么不合并?
这是经典的模板算法,并非只对Reaching Definition适用。
for中 $OUT[B]=\phi$ ?
may analysis一般为空
must analysis一般为top($\top$)
为什么这个算法最终可以停止?
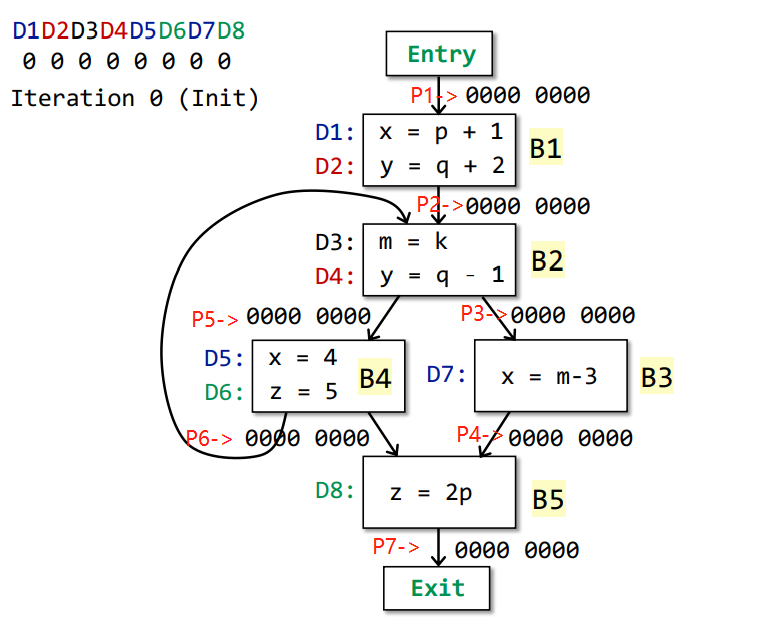
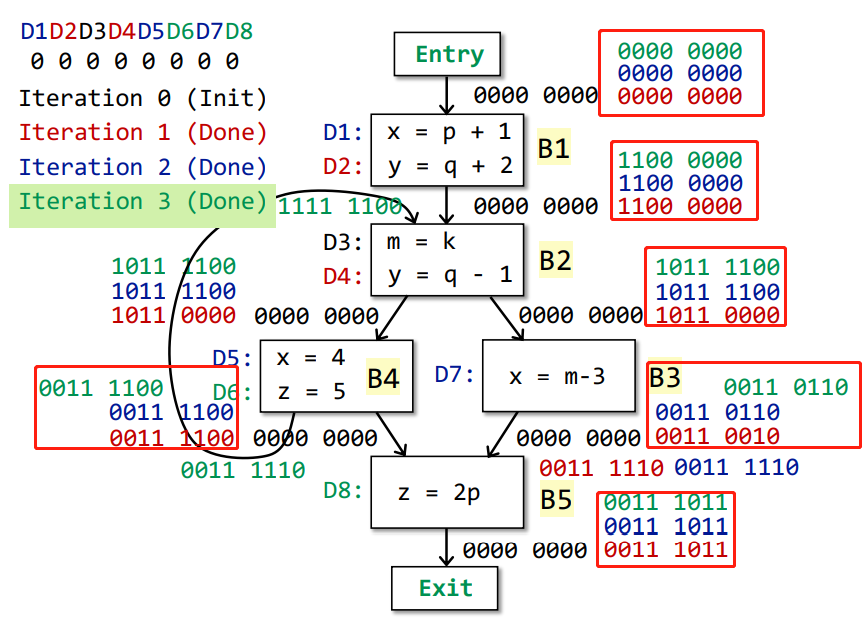
Example
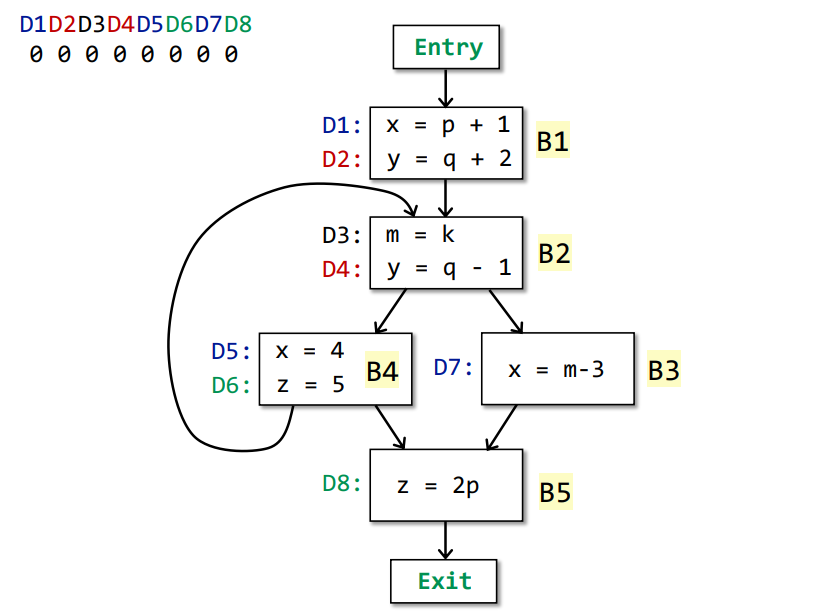
Iteration 0(Init)
| Input | gen | kill | Output | |
|---|---|---|---|---|
| entry | 0000 0000 | |||
| B1 | 0000 0000 | |||
| B2 | 0000 0000 | |||
| B3 | 0000 0000 | |||
| B4 | 0000 0000 | |||
| B5 | 0000 0000 |
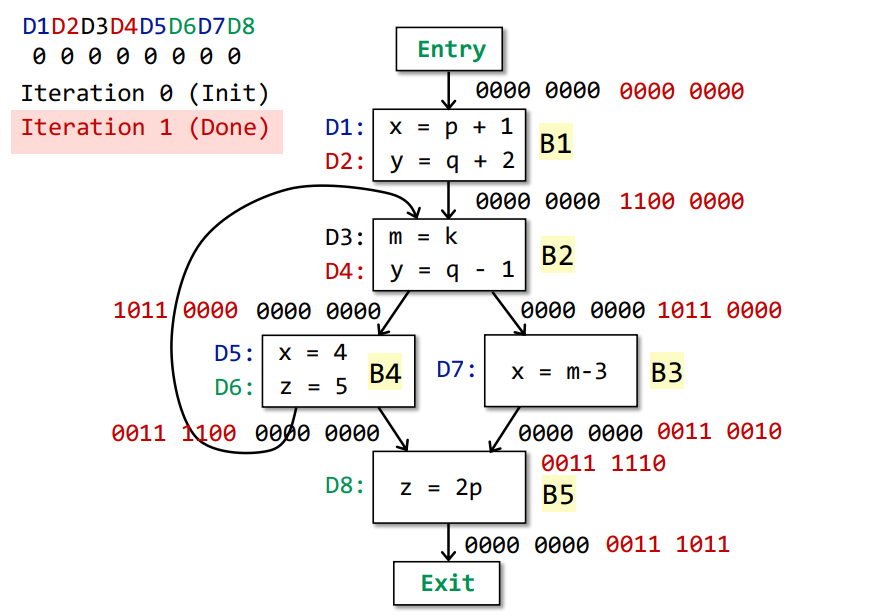
Iteration 1
| Input | gen | kill | Output | |
|---|---|---|---|---|
| B1 | 0000 0000 | D1 D2 | D4 D5 | 1100 0000 |
| B2 | 0000 0000(O[B4]) U 1100 0000(O[B1]) | D3 D4 | D2 | 1011 0000 |
| B3 | 1011 0000 | D7 | D1 D5 | 0011 0010 |
| B4 | 1011 0000 | D5 D6 | D1 D8 | 0011 1100 |
| B5 | 0011 0010(O[B4]) U 0011 1100(O[B3]) | D8 | D6 | 0011 1011 |
Changes occur in OUT[] of B1,B2,B3,B4,B5
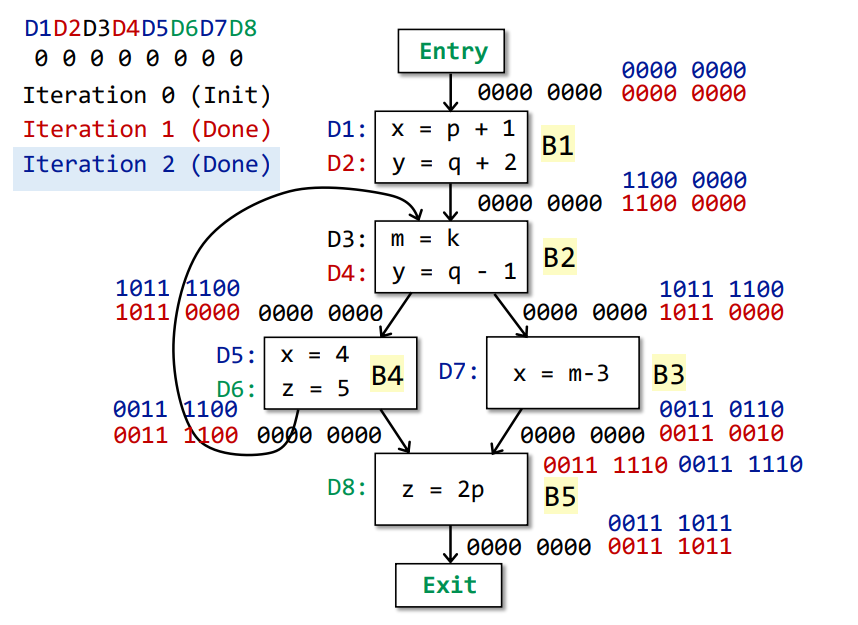
Iteration 2
| Input | gen | kill | Output | |
|---|---|---|---|---|
| B1 | 0000 0000 | D1 D2 | D4 D5 | 1100 0000 |
| B2 | 0011 1100(O[B4]) U 1100 0000(O[B1]) | D3 D4 | D2 | 1011 1100 |
| B3 | 1011 1100 | D7 | D1 D5 | 0011 0110 |
| B4 | 1011 1100 | D5 D6 | D1 D8 | 0011 1100 |
| B5 | 0011 1100 U 0011 0110 | D8 | D6 | 0011 1011 |
Changes occur in OUT[] of B2 B3
Iteration 3
| Input | gen | kill | Output | |
|---|---|---|---|---|
| B1 | 0000 0000 | D1 D2 | D4 D5 | 1100 0000 |
| B2 | 0011 1100(O[B4]) U 1100 0000(O[B1]) | D3 D4 | D2 | 1011 1100 |
| B3 | 1011 1100 | D7 | D1 D5 | 0011 0110 |
| B4 | 1011 1100 | D5 D6 | D1 D8 | 0011 1100 |
| B5 | 0011 1100 U 0011 0110 | D8 | D6 | 0011 1011 |
No changes occur in any OUT[]. We get the final analysis result.
Why this iterative can finally algorithm stop?
$OUT[S] = gen_S U (IN[S] - kill_S)$;
- $gen_S$ and $kill_S$ remain unchanged
- When more facts flow in $IN[S]$, the “more facts” either
- is killed, or
- flows to $OUTS$
- When a fact is added to $OUT[S]$, through either $gen_S$, or $survivor_S$ , it stays there forever
- Thus $OUT[S]$ never shrinks(e.g., 0 -> 1, or 1 -> 1)
- As the set of facts is finite (e.g., all definitions in the program), there must exist a pass of iteration during which nothing is added to any OUT, and then the algorithm terminates
Safe to terminate by this condition?
- IN’s will not change if OUT’s do not change
- OUT’s will not change if IN’s do not change
- Reach a fixed point. Also related with monotonicity(next lectures)